
Беспилотный не означает бесконтрольный, поэтому кто управляет?
Когда мы думаем о роботах, дронах или автономных транспортных средствах, мы обычно представляем оборудование — механические руки, сенсоры, колеса или крылья. Но за каждой миссией, каждым движением и каждым решением в реальном времени стоит контролер, управляющий всем процессом. Настоящий вопрос не только в том, что может сделать робот, но и о том, как им управляют.

По мере того, как отрасли по всему миру ускоряют переход к автоматизации и интеллектуальным системам, роботизированный контроллер стал «мозгом» машины, превращающей человеческое намерение в точные, быстрые действия в поле. Это звено между оператором и беспилотной системой, между целями миссии и их физическим исполнением. Независимо от того, используется ли он для навигации БПЛА в военных операциях, управления инспекционными работами на удаленных трубопроводах или управления флотом мобильных роботов на «умных» фабриках, контролер давно вышел за пределы своей традиционной роли и стал центральным элементом критически важных операций.
 Основные вызовы традиционных систем управления работами:
Основные вызовы традиционных систем управления работами:
- Ограниченная мобильность
- Низкая устойчивость к воздействию среды
- Устаревшие интерфейсы и UX
- Проблемы с подключением и задержками
- Отсутствие гибкости и интеграции
- Неоптимизированность для современных edge-сред
Преимущества от внедрения роботизированных контролеров:
- 40% повышение эффективности рабочих процессов
- 30% сокращение ручного вмешательства
- 30% улучшение принятия решений в реальном времени
Исследования показывают, что роботизированные контроллеры способны улучшить эффективность рабочих процессов до 40%, уменьшить потребность в ручном вмешательстве на 30% и на 30% повысить качество принятия решений в реальном времени. Эти достижения достигаются благодаря более интуитивным интерфейсам, более быстрой обработке данных и лучшему контролю оператора над беспилотными системами. Результат — более разумная, безопасная и продуктивная среда миссий в различных областях.
Три основных техники соединения беспилотных систем
1. Встроенный беспроводной RF-модуль
Этот метод интегрирует беспроводной RF модуль непосредственно в контроллер робота. Это позволяет осуществлять беспроводную связь с дронами, сервисными работами и другими мобильными платформами без необходимости внешнего оборудования.

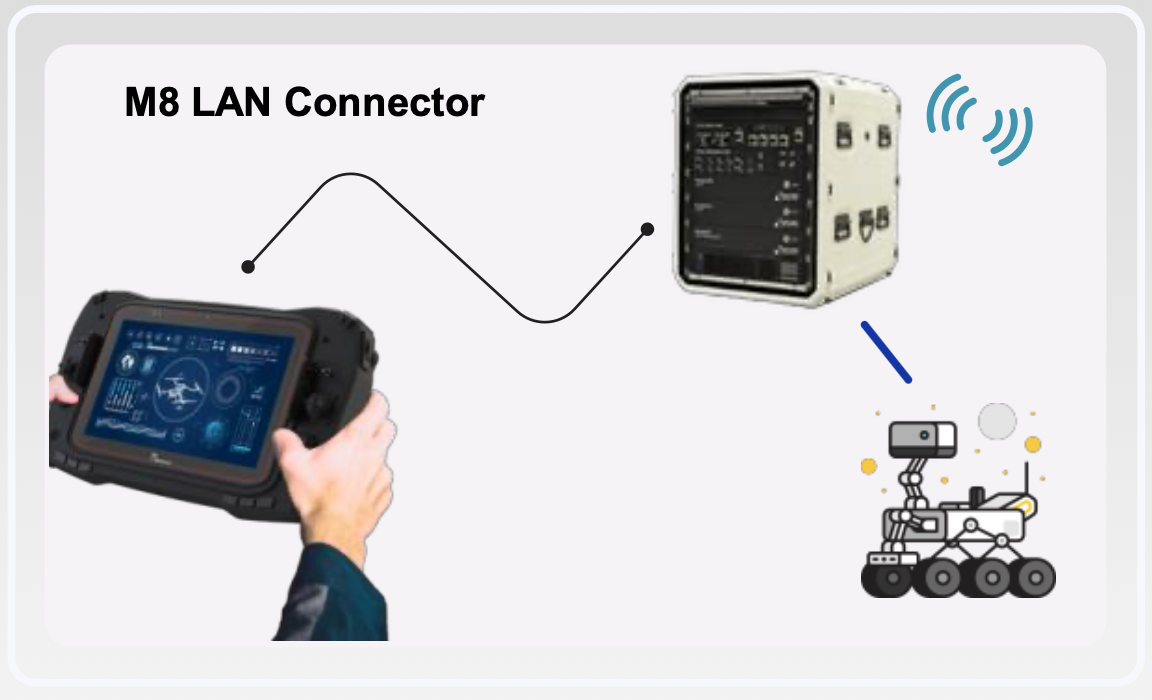
2. LAN к внешней беспроводной RF-станции
В такой конфигурации контроллер оснащен прочным LAN-портом M8, подключаемым к внешней беспроводной RF-станции. Это позволяет передавать сигналы LAN через защищенное, герметичное соединение, идеально подходящее для сложных или промышленных условий, где внешние RF-модули обеспечивают более сильный сигнал или больший радиус действия.
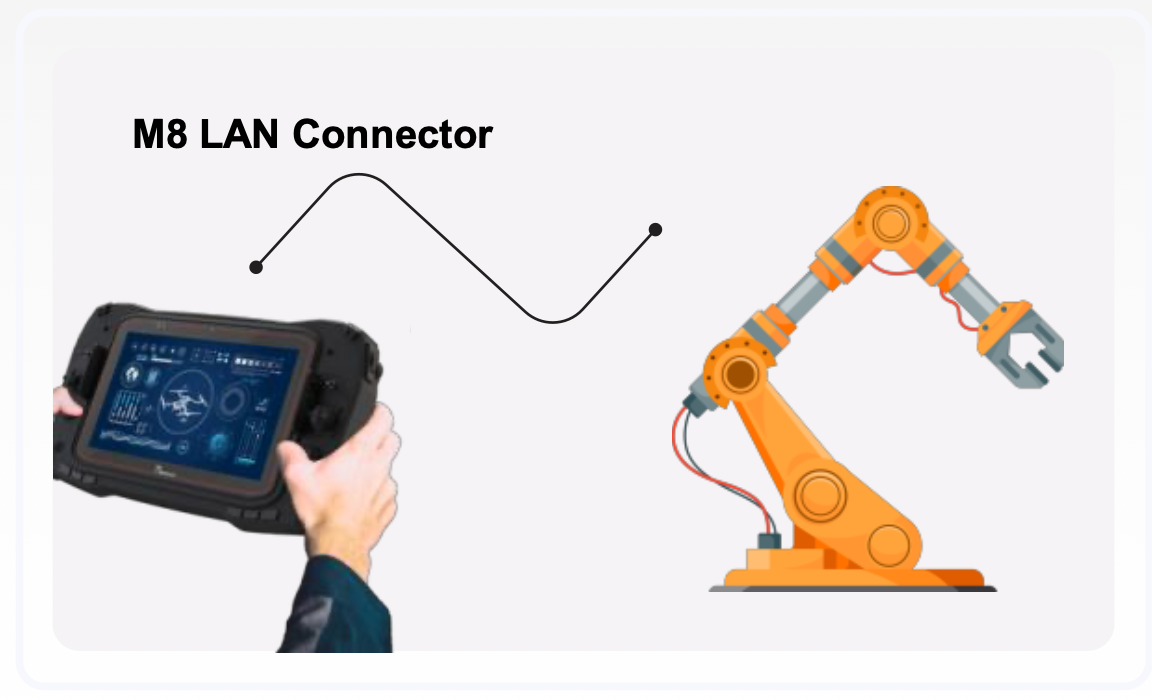
3. Прямое LAN-соединение с роботом
Этот метод использует тот же самый прочный LAN-порт M8, но подключается непосредственно к работе, минуя любые беспроводные настройки. Это проводное соединение является надежным, устойчивым к помехам и хорошо подходит для стационарных роботизированных систем, таких как промышленные манипуляторы или наземные беспилотники (UGV), работающие в контролируемой среде.
Дополнительные методы связи для беспилотных систем
Кроме RF-модулей и прямых LAN-соединений, современные беспилотные системы используют широкий спектр технологий:
- Сотовые сети (LTE, 5G) — высокоскоростная, низкозадержочная связь для операций вне прямой видимости.
- Mesh-сети или ad hoc сети (MANET/FANET) – обмен данными между несколькими работами без привязки к инфраструктуре.
- Воздушные ретрансляторы или привязанные дроны – расширение зоны покрытия в сложных условиях.
- Спутниковая связь обеспечивает глобальную коммуникацию в отдаленных районах без наземных сетей.
- Стандартизированные протоколы (MAVLink, JAUS) – унифицируют обмен данными между платформами и контроллерами.
Эти технологии обеспечивают гибкие и масштабируемые инструменты для поддержания управления в реальном времени в различных областях и условиях.
Серия защищенных ручных контроллеров Winmate

Серия надежных портативных контроллеров Winmate

Серия роботизированных контроллеров Winmate предлагает полностью индивидуальные варианты – от джойстиков, переключателей и кнопок до интегрированных RF-модулей. Winmate обеспечивает гибкость в создании интерфейса управления, максимально отвечающего вашим задачам. Благодаря крепкой конструкции, модульной подключаемости и эргономичному дизайну контроллеры готовы к использованию в полевых условиях.
Применение роботизированных контроллеров
Инфраструктура и общественная безопасность:
- Инспекция мостов и аварийное реагирование
- Разведка зон стихийных бедствий
- Обзор тоннелей и подземных сооружений
- Развертывание пожарных роботов

Морская отрасль и оборона:
- Патрулирование портовой безопасности с помощью USV/UGV
- Обнаружение подводных мин
- Автономное морское картографирование
- Тактическое применение UGV в зонах конфликта

Мониторинг окружающей среды:
- Раннее обнаружение лесных пожаров
- Картографирование сельскохозяйственных угодий
- Оценка состояния окружающей среды после катастроф
- Мониторинг эрозии побережья

Состав и логистика:
- Перемещение паллет по мобильным работам (AMR)
- Кросс-докинговые операции
- Инвентаризация на складах с высокими стеллажами
- Погрузка и разгрузка трейлеров работами

Масштабирование инноваций в сфере роботизированного управления
По мере того, как беспилотные системы становятся все более автономными и адаптивными, увеличивается спрос на надежные решения для управления в реальном времени. Серия роботизированных контроллеров Winmate создана для удовлетворения этой потребности, предлагая настраиваемые высокопроизводительные контроллеры, интегрированные с современными технологиями.
Поскольку глобальный рынок автономных систем будет расти до 2030 года, Winmate продолжает лидировать, совершенствуя готовность к использованию искусственного интеллекта, координацию нескольких роботов и беспроводную подключаемость для будущих беспилотных операций.
По материалам Winmate






Войдите или зарегистрируйтесь