
Безпілотний не означає безконтрольний, тож хто керує?
Коли ми думаємо про роботів, дрони чи автономні транспортні засоби, ми зазвичай уявляємо обладнання — механічні руки, сенсори, колеса або крила. Але за кожною місією, кожним рухом і кожним рішенням у реальному часі стоїть контролер, що керує всім процесом. Справжнє питання не тільки в тому, що може зробити робот, а й у тому, як ним керують.

У міру того як галузі по всьому світу прискорюють перехід до автоматизації та інтелектуальних систем, роботизований контролер став «мозком» машини, що перетворює людський намір на точні, швидкі дії в полі. Це — ланка між оператором і безпілотною системою, між цілями місії та їх фізичним виконанням. Незалежно від того, чи використовується він для навігації БпЛА у військових операціях, керування інспекційними роботами на віддалених трубопроводах або управління флотом мобільних роботів на «розумних» фабриках, контролер давно вийшов за межі своєї традиційної ролі й став центральним елементом критично важливих операцій.
 Основні виклики традиційних систем керування роботами:
Основні виклики традиційних систем керування роботами:
- Обмежена мобільність
- Низька стійкість до впливу середовища
- Застарілі інтерфейси та UX
- Проблеми з підключенням і затримками
- Відсутність гнучкості та інтеграції
- Неоптимізованість для сучасних edge-середовищ
Переваги від впровадження роботизованих контролерів:
- 40% підвищення ефективності робочих процесів
- 30% скорочення ручного втручання
- 30% покращення прийняття рішень у реальному часі
Дослідження показують, що роботизовані контролери здатні покращити ефективність робочих процесів до 40%, зменшити потребу у ручному втручанні на 30% та ще на 30% підвищити якість прийняття рішень у реальному часі. Ці здобутки досягаються завдяки більш інтуїтивним інтерфейсам, швидшій обробці даних та кращому контролю оператора над безпілотними системами. Результат — розумніше, безпечніше та продуктивніше середовище місій у різних галузях.
Три основні техніки з’єднання безпілотних систем
1. Вбудований бездротовий RF-модуль
Цей метод інтегрує бездротовий RF-модуль безпосередньо в контролер робота. Це дозволяє здійснювати бездротовий зв’язок із дронами, сервісними роботами та іншими мобільними платформами без необхідності зовнішнього обладнання.

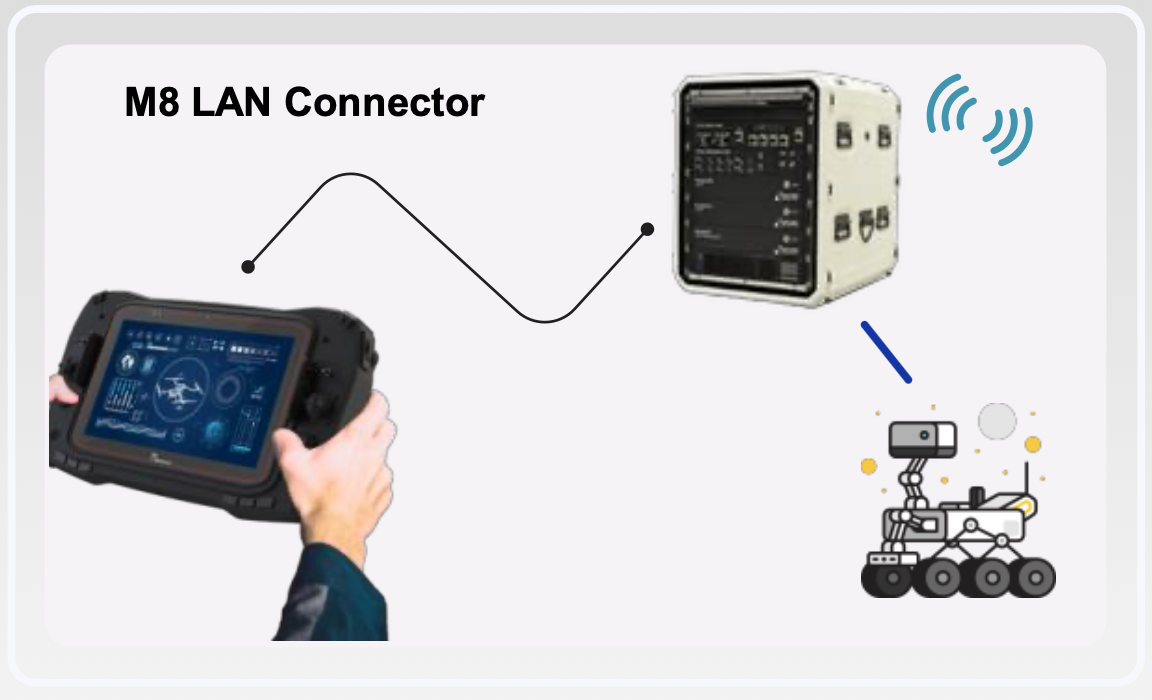
2. LAN до зовнішньої бездротової RF-станції
У такій конфігурації контролер оснащено міцним LAN-портом M8, який підключається до зовнішньої бездротової RF-станції. Це дозволяє передавати сигнали LAN через захищене, герметичне з’єднання, що ідеально підходить для складних або промислових умов, де зовнішні RF-модулі забезпечують сильніший сигнал або більший радіус дії.
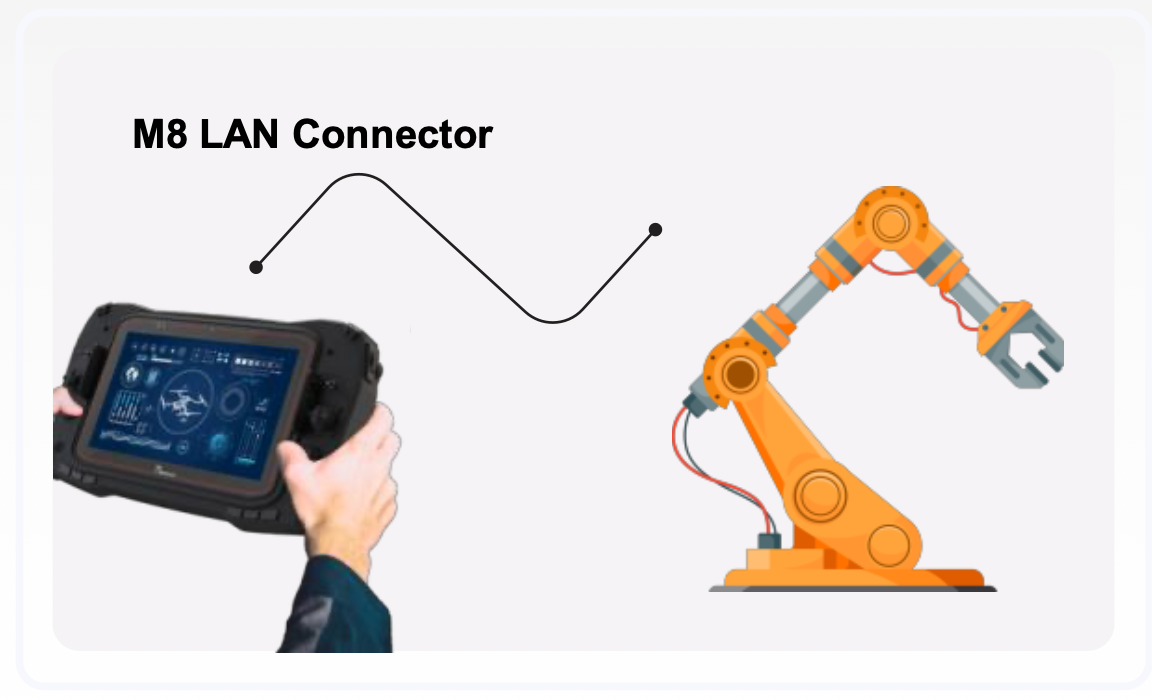
3. Пряме LAN-з’єднання з роботом
Цей метод використовує той самий міцний LAN-порт M8, але підключається безпосередньо до робота, оминаючи будь-які бездротові налаштування. Це дротове з’єднання є надійним, стійким до перешкод і добре підходить для стаціонарних роботизованих систем, таких як промислові маніпулятори або наземні безпілотники (UGV), що працюють у контрольованому середовищі.
Додаткові методи зв’язку для безпілотних систем
Окрім RF-модулів та прямих LAN-з’єднань, сучасні безпілотні системи використовують широкий спектр технологій:
- Стільникові мережі (LTE, 5G) — високошвидкісний, низькозатримковий зв’язок для операцій поза прямою видимістю.
- Mesh-мережі або ad hoc мережі (MANET/FANET) — обмін даними між кількома роботами без прив’язки до інфраструктури.
- Повітряні ретранслятори або прив’язані дрони — розширення зони покриття в складних умовах.
- Супутниковий зв’язок — забезпечує глобальну комунікацію у віддалених районах без наземних мереж.
- Стандартизовані протоколи (MAVLink, JAUS) — уніфікують обмін даними між платформами та контролерами.
Ці технології забезпечують гнучкі та масштабовані інструменти для підтримання керування в реальному часі в різних сферах та умовах.
Серія захищених ручних контролерів Winmate

Серія надійних портативних контролерів Winmate

Серія роботизованих контролерів Winmate пропонує повністю індивідуальні варіанти — від джойстиків, перемикачів і кнопок до інтегрованих RF-модулів. Winmate забезпечує гнучкість у створенні інтерфейсу керування, який максимально відповідає вашим завданням. Завдяки міцній конструкції, модульній підключуваності та ергономічному дизайну контролери готові до використання в польових умовах.
Застосування роботизованих контролерів
Інфраструктура та громадська безпека:
- Інспекція мостів та аварійне реагування
- Розвідка зон стихійних лих
- Огляд тунелів і підземних споруд
- Розгортання пожежних роботів

Морська галузь і оборона:
- Патрулювання портової безпеки за допомогою USV / UGV
- Виявлення підводних мін
- Автономне морське картографування
- Тактичне застосування UGV у зонах конфлікту

Моніторинг довкілля:
- Раннє виявлення лісових пожеж
- Картографування сільськогосподарських угідь
- Оцінка стану довкілля після катастроф
- Моніторинг ерозії узбережжя

Склад і логістика:
- Переміщення палет мобільними роботами (AMR)
- Крос-докінгові операції
- Інвентаризація на складах з високими стелажами
- Завантаження та розвантаження трейлерів роботами

Масштабування інновацій у сфері роботизованого керування
У міру того, як безпілотні системи стають все більш автономними та адаптивними, зростає попит на надійні рішення для керування в реальному часі. Серія роботизованих контролерів Winmate створена, щоб задовольнити цю потребу, пропонуючи настроювані високопродуктивні контролери, інтегровані з сучасними технологіями.
Оскільки глобальний ринок автономних систем очікувано зростатиме до 2030 року, Winmate продовжує лідирувати, вдосконалюючи готовність до використання штучного інтелекту, координацію кількох роботів і бездротову підключуваність для майбутніх безпілотних операцій.
За матеріалами Winmate






Увійдіть або зареєструйтесь